[汽车之家 AH-100] 这期AH-100我们测试了前不久刚刚上市的iCAR V27(参数|询价)顶配(2026款 200KM四驱猎鹰700),指导价还不到20万,但配置可以说是直接拉满。不过在加速测试中,电量100%时的iCAR V27,输出功率反而不如电量降到90%以下时来得更高。那么,iCAR V27的实际性能表现如何?作为一台造型硬派的新能源方盒子SUV,它的越野能力究竟处在什么水平?作为iCAR旗下首款增程车型,它的真实能耗是否令人满意?而猎鹰700高阶辅助驾驶,在真实道路中的实际表现又怎么样?带着这些问题,我们一起进入本期测试。

脱困及越野测试
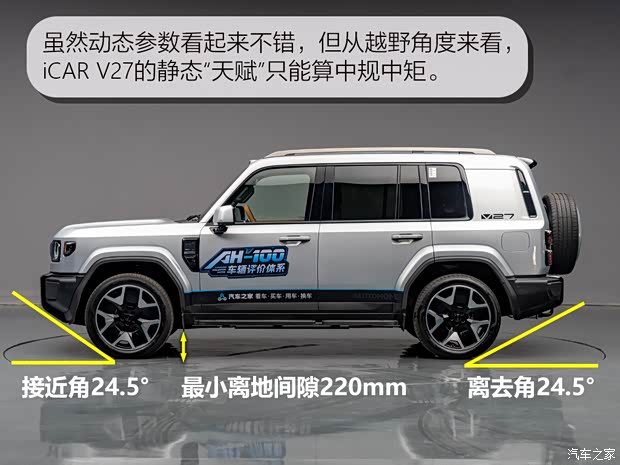
iCAR V27搭载1.5T增程器、34.3kWh磷酸铁锂电池、双电机四驱以及固定齿比变速箱的组合,电动机最大功率456Ps,最大扭矩505N·m,整备质量2335kg。虽然动态参数看起来不错,但从越野角度来看,它的静态“天赋”只能算中规中矩。测试前,我们将驾驶模式调至“凹凸”模式。面对设置的5个滑轮组脱困工况,iCAR V27仅在交叉轴测试中可以较为轻松地完成脱困。即便是面对双前轮有附着力,以及双后轮有附着力的工况,车辆的脱困表现也依旧比较艰难。


在场地越野测试中,iCAR V27面对70%和80%坡度时,整体通过过程较为轻松。但当坡度提升至90%后,无论是驾驶员手动控制,还是开启低速蠕行模式,车辆都无法顺利完成挑战。
其中,在驾驶员自行控制的情况下,车辆爬至坡道中段后,会因重心转移到车尾,以及轮胎抓地力不足而失去继续攀爬的能力。而在使用低速蠕行模式卡在坡道中间时,如果驾驶员踩下加速踏板,车辆还会因为人为介入而瞬间退出蠕行模式,导致车辆快速溜下坡道,这样的设定存在一定安全隐患,实际使用时需要特别注意。

iCAR V27在交叉轴、蝴蝶谷以及侧坡项目中的通过表现明显更加从容。相比仅有前轴或后轴具备附着力的情况,当对角线上的车轮同时拥有附着力时,车辆的脱困能力会更强,整个通过过程也更轻松。不过,虽然它的悬架行程相比城市SUV要更长一些,但和采用非承载式车身的硬派SUV相比仍有差距,因此在交叉轴测试中,车轮离地的情况还是不可避免地出现了。
另外,低速蠕行模式下,车辆默认最高车速可达到13km/h,在面对不熟悉的越野路线时,这样的速度并不算慢,驾驶者仍需主动控制车速,避免因为接近过快而影响车辆姿态和通过节奏。
能耗测试

随后我们在120kW的第三方充电桩对其进行了充电测试,从8%-100%共计充入电量35.86kWh,用时46min,30-80%充电时间为15min,补能效率较为不错。根据充入电量与行驶里程计算得出平均电耗为21.2kWh/100km。

辅助驾驶
本次测试的iCAR V27 2026款 200KM四驱猎鹰700版,搭载560TOPS算力的地平线征程6P芯片,全车配备11个摄像头、12个超声波雷达、3个毫米波雷达以及1个激光雷达,共27个感知硬件单元。此前在星途ET5上,这套辅助驾驶系统曾给我们留下了不错的印象,但在iCAR V27上,它的实际表现却有着明显差异。在全部20个考点中,这台车共通过了13个。

面对规则相对清晰、路线逻辑较为直接的常规通行场景,例如无保护左转、主路进辅路、多选择左转等考点,车辆整体表现还是可圈可点的。对于机非混行盘桥、立交桥下环岛这类需要与更多交通参与者进行博弈的场景,车辆虽然能够完成通行,但整体效率偏低,驾驶风格也明显更保守。同时,在机非混行盘桥考点中,系统的路径选择也存在一定问题,例如右转时转向半径过大,压实线直接驶入第二条车道,但前方需要从最右侧驶出主路时,它又再次压实线变回最右侧车道。至于地库、园区领航、居民区通行这类更依赖无图能力和场景理解的考点,车辆所配备的漫游功能,现阶段还无法根据路标信息自主完成通行。

在限速50km/h、系统设定时速为60km/h的路段中,即便前车距离较远,车辆实际行驶速度也只有40km/h左右,通行效率不算高。除此之外,测试过程中还曾出现两次车头前方有人时车辆反而加速的情况。
辅助泊车

在辅助泊车测试中,iCAR V27 面对我们设置的侧方车位、入侵车位以及断头路泊车三项工况,均能够较为顺利地完成测试。整体来看,这套泊车系统在识别速度和轨迹规划方面都较为合理,属于可用范围。


